

序論:テスラは「走る精密カメラ」である
テスラの魅力は加速やFSD(完全自動運転)だけではありません。
車体に張り巡らされた多数のカメラを活用した**「ダッシュカム(車載ドラレコ)」**機能は、電子系エンジニアの視点で見ても極めて合理的な設計がなされています。
「専用のドラレコを買う必要があるの?」「USBの中身はどうなっているの?」という疑問に対し、実際のデータ構造(フォルダ構成)を元に、その仕組みを詳しく解説します。
1. ダッシュカムの保存先とカメラ位置
テスラのダッシュカムは、車両に搭載されたオートパイロット用のカメラを流用して録画を行います。
🎥 録画されている「6つの視点」
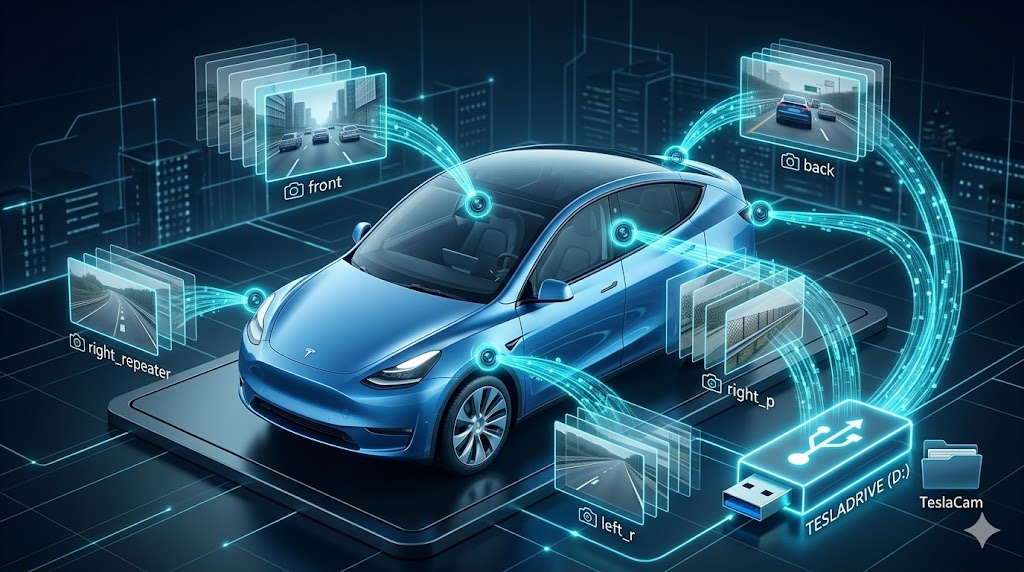
一般的なドラレコが前後2方向であるのに対し、テスラは以下の6つの視点を同時に記録しています(添付画像参照)。

- front: フロントガラス上部中央(前方のメイン視界)
- back: リアゲート(後方の視界)
- left_pillar / right_pillar: 左右のBピラー(側方・死角の監視)
- left_repeater / right_repeater: 左右フロントフェンダー(後側方の視界)
これだけの視点を一括管理できるのは、車両全体が1つのコンピュータで制御されているテスラならではの強みです。

2. USBメモリ内のフォルダ構成を解読する
テスラのUSB(TESLADRIVE)をPCで開くと、そこにはエンジニアリング的な秩序に基づいたフォルダ群が現れます。
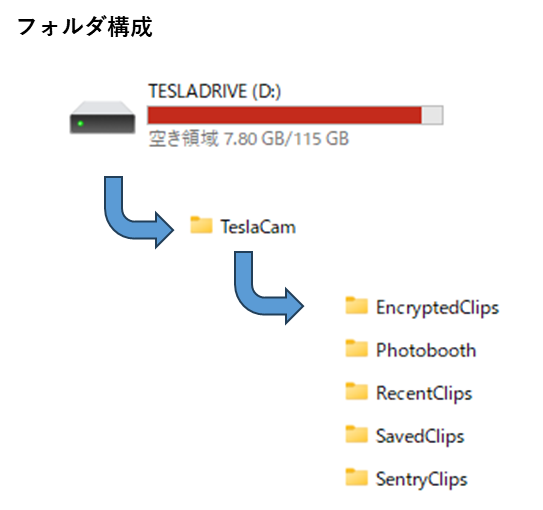
📂 フォルダの役割
- TeslaCam: 全てのデータの親フォルダ。
- RecentClips: 直近のループ録画データ。
- SavedClips: ドライバーが手動、またはホーン(設定時)で保存した重要なデータ。
- SentryClips: センチネルモード(駐車中監視)で検知されたイベントデータ。
- EncryptedClips: 暗号化されたセキュアなクリップ。
- Photobooth:おもちゃ箱に追加された車内撮影できるデータ
📄 ファイル名の規則
ファイル名は yyyy-mm-dd_hh-mm-ss-front.mp4 のように、**「日時」+「カメラ位置」**で構成されています。
特定のイベントを探す際は、日時のフォルダから各方位のファイルを突き合わせることで、事故やトラブルの状況を多角的に分析することが可能です。
エレナ、見てごらん。この車は前後左右、さらには死角までをもデジタルな『眼』で捉え、すべてを記録しているのだよ。
まさに鉄壁の守りですね。でもテスラ様、これだけのデータ量をUSB一つで管理するのは、論理的に見てかなりの負荷ではありませんか?
だからこそ、無駄な書き込みを減らすループ構造(RecentClips)と、重要な瞬間を分ける管理が必要なのだ。エンジニアが設計したこのフォルダ構成は、情報の『秩序』そのものだよ。
なるほど、Recent(直近)とSaved(保存)を分けることで、効率的なデータ運用を実現しているのですね!
3. ダッシュカムを正しく使うための設定
テスラのダッシュカムを最大限に活用するために、以下の設定を確認しておきましょう。
- 保存トリガー: ホーンを鳴らしたときに録画を保存する設定にしておくと、いざという時にボタンを探す手間が省けます。
- USBのフォーマット: 速度の速いUSB 3.0以上のメモリ、または高耐久のSSDを使用することを推奨します。安価なUSBメモリでは、複数のカメラフィードを同時に書き込む際のデータ転送速度が追いつかず、エラーの原因になります。(基本は納車時についているもので問題なしです)
またダッシュカムのアイコンをクリックすると、最新10分間の映像をUSBフラッシュ ドライブに保存可能です。
以下のようなアイコンです。

🛠️ エンジニアの余談:Pythonで自作!「テスラ・マルチカム・ビューアー」
ここまで解説してきた通り、テスラのダッシュカムは6つの視点を別々の動画ファイルとして保存します。
しかし、PCで事故の状況などを確認する際、6つのファイルをいちいち個別に開いて、時間を合わせて再生するのは非常に面倒です。
「それなら、1つの画面で全方向を同時に再生できるツールを作ればいい」
そう考え、自動車電子系エンジニアの本領を発揮して、Pythonで専用の「マルチビューアー」を自作しました。
🖥️ 自作ビューアーのデモ画面
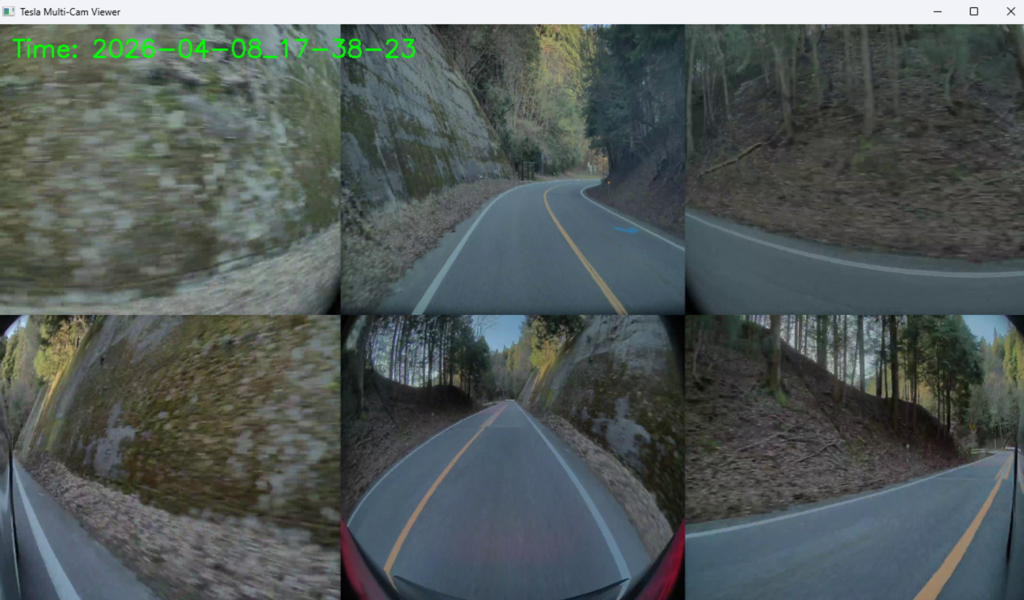
- 全方位同時再生: 前後、左右ピラー、左右リピーターの全6ファイルを、時間を完全に同期させて1つのウィンドウで表示します。
- タイムスタンプ表示: 録画された正確な日時(Time: 2026-04-08_17-38-23)をオーバーレイ表示。
- ロジカルな分析: Bピラーとリピーターの映像を並べることで、側方の死角から接近する車両の動きを、物理的な矛盾なく連続して捉えることができます(日本の狭い峠道などでは非常に有用です)。
自分でロジックを組んで作ったツールは、必要な機能だけを実装できるため非常に快適です。
もし「自分もPythonでツールを作ってみたい」「このビューアーの仕組みが知りたい」という方がいれば、ぜひコメントやSNSで教えてください。
好評であれば、コードの解説記事なども検討します!
結論:テスラの記録は「証拠」以上の価値がある
自動車電子系エンジニアとして、テスラのダッシュカムは「もしも」の時の証拠能力だけでなく、車両の全方位をデータ化する素晴らしいシステムだと断言できます。
USBの中身を理解しておくことで、万が一の際に「どのデータを、どう探すべきか」という論理的な対処が可能になります。
ぜひ一度、お手元のUSBをPCで確認して、テスラの「視点」を覗いてみてください。

コメント